El movimiento plano general de un cuerpo rígido se describe como una combinación de traslación y rotación.
Para este análisis establecemos un lugar absoluto en el espacio (plano xy), y colocamos un punto base en el objeto, a partir del cual se establece otro sistema (plano x´y´).


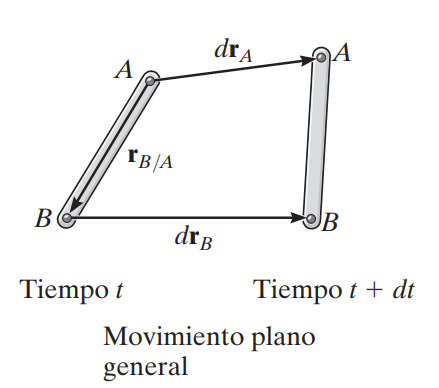
Primero, toda la barra primero se traslada una cantidad drA de modo que A, el punto base, se mueve a su posición final y el punto B a B´.
Luego la barra gira alrededor de A una cantidad “d” de modo que B´ experimenta un desplazamiento relativo drB/A y se mueve a su posición final B.

Por lo tanto es desplazamiento de B se describe como:

Velocidad. Para determinar la relación entre las velocidades de los puntos A y B consideramos la derivada con respecto al tiempo de la ecuación de posición:
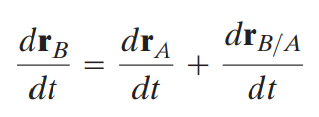
Ya que las derivadas de A y B son absolutas, y la tercer derivada es relativa, tenemos:

Velocidad angular.
Toda la barra se traslada con una velocidad de vA, que gira alrededor de A con una velocidad angular W.




Aceleración angular.
Bajo los mismos términos de la velocidad, las derivadas de A y B son absolutas, y la tercer derivada es relativa, por consiguiente, aB/A puede expresarse en función de sus componentes tangencial y normal:




Comentarios
Publicar un comentario